
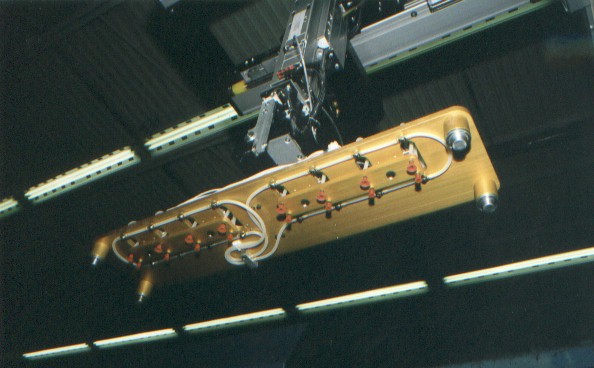

Insert molding can be accomplished by a robotic End Of Arm Tool (EOAT) attached to the customers robot and a loading station. The application pictured above is manually loaded by an operator. The finished parts were ejected from the mold and then the robot moved into position to place eight metal inserts. Accurate location was accomplished by using tapered pins on the EOAT and mating cups in the mold. The inserts were indexed from the EOAT to the mold and released. The operator station is interfaced to the robot control to provide a safe working environment.