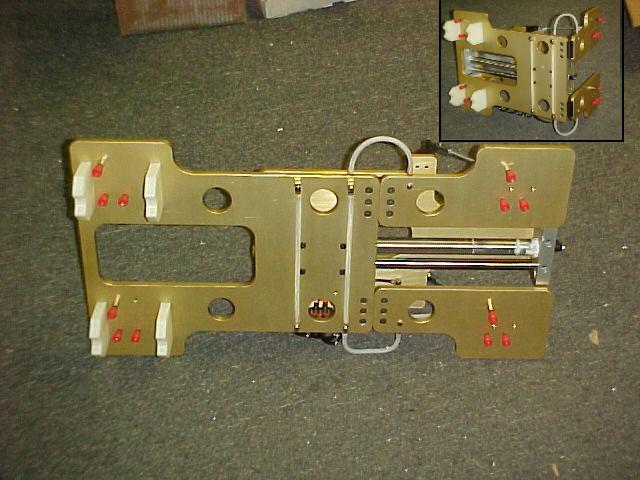
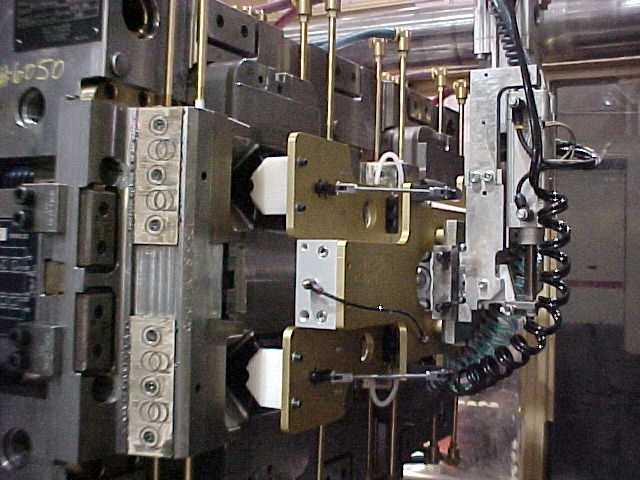
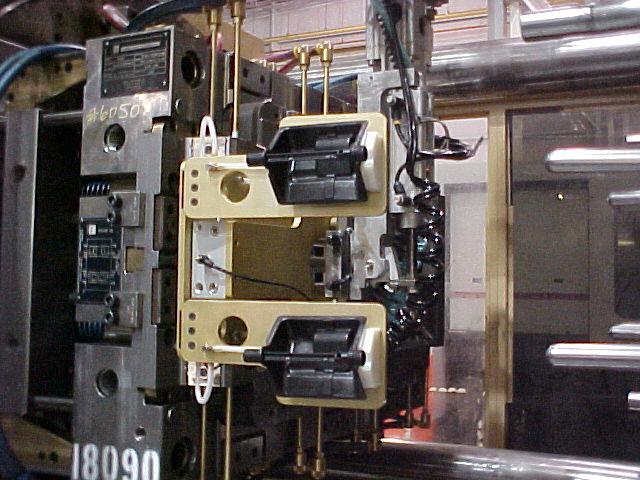
Transfer molding can be accomplished by a robotic End Of Arm Tool (EOAT) attached to the customers robot. The application pictured above is a typical transfer molding operation. The finished parts and first shot parts were ejected from the mold and then the robot moved into position to place the first shot parts into the second shot cavities. This application required that the EOAT reduce its overall length to prevent colliding with the operator gate.